查看决赛培训的回放与文件.
考虑一个常系数稳态扩散方程
−λ∇2T=f
式中的 T 为待求的场 (如温度场), f 是已知的源项, λ 是扩散系数, 在这里设常数, ∇2 是 Laplace 算子, 在 n 维空间中, 其含义为
∇2T=i=1∑n∂xi2∂2T
先考虑一维的情形, 则上述方程可写为
−λdx2d2T(x)=f(x)
对于比较复杂的方程形式或者比较复杂的源项 f(x) , 可能无法简单地求出解析解, 在此情况下, 可以尝试求上述方程的数值解.
所谓有限差分法, 就是将求解域划分为差分网格, 用有限个网格节点代替连续的求解域, 把导数用网格节点上的函数值的差商代替进行离散, 建立以网格节点上的值为未知数的代数方程组, 从而将微分问题变为代数问题, 从而可利用计算机求解.
有限差分法所研究的节点位于网格顶点 (与此相对, 有限体积法的节点位于网格中心), 下图即为一个一维的网格划分示意图:

假设划分的网格是均匀的 (在决赛题目中亦遵从此假设), 每两个节点的间距为 h , 以 Ti 点为研究对象, 其一阶导数可表示为
Ti′≈hTi+1−Ti Ti′≈hTi−Ti−1
这两种表达可分别被称为前向导数与后向导数. 二阶导数可以表示为
Ti′′≈h2Ti+1−2Ti+Ti−1
这样, 上述一维常系数稳态扩散方程则可写为离散化的形式
−h2λTi+1+h22λTi−h2λTi−1=fi
但是, 对于边界处的点, 一般需要额外处理, 即边界条件. 在决赛中, 我们所用的是第一类边界条件 (Dirichlet 边界条件), 即边界处的值为 0 , 即
T0=TNx=0
这样, 由上述 Nx−1 个内部方程, 与 2 个边界方程, 即组成了一个由 Nx+1 个方程组成的线性方程组, 求解该线性方程组, 得到的解向量即为所有节点处的 T 值.
有限差分法的精度, 可以通过泰勒展开来分析, 以上述问题为例, 由泰勒展开可得
Ti+1=Ti+1!1dxdTih+2!1dx2d2Tih2+3!1dx3d3Tih3+4!1dx4d4Tih4+O(h5) Ti−1=Ti−1!1dxdTih+2!1dx2d2Tih2−3!1dx3d3Tih3+4!1dx4d4Tih4+O(h5)
将其代入差分的表达式, 可得
h2Ti+1−2Ti+Ti−1=dx2d2Ti+121dx4d4Tih2+O(h3)
将其代入原始方程, 可得
−λdx2d2Ti−fi=−λdx2d2Ti+λh2Ti+1−2Ti+Ti−1=12λdx4d4Tih2+O(h3)
由此可见, 该离散格式在空间上是二阶精度的.
通过选取更多的节点来表示导数, 可以获得更高精度的离散格式, 在决赛题目中, 由于限定了离散格式, 并以限定的离散格式来评分, 所以请不要更改离散格式, 否则即使更接近真实情况, 分数也会更低.
二维问题与一维问题类似, 首先, 我们需要把一个二维的平面用一维的向量来表示, 采用下图所示的方式为节点编号 (从 0 开始):
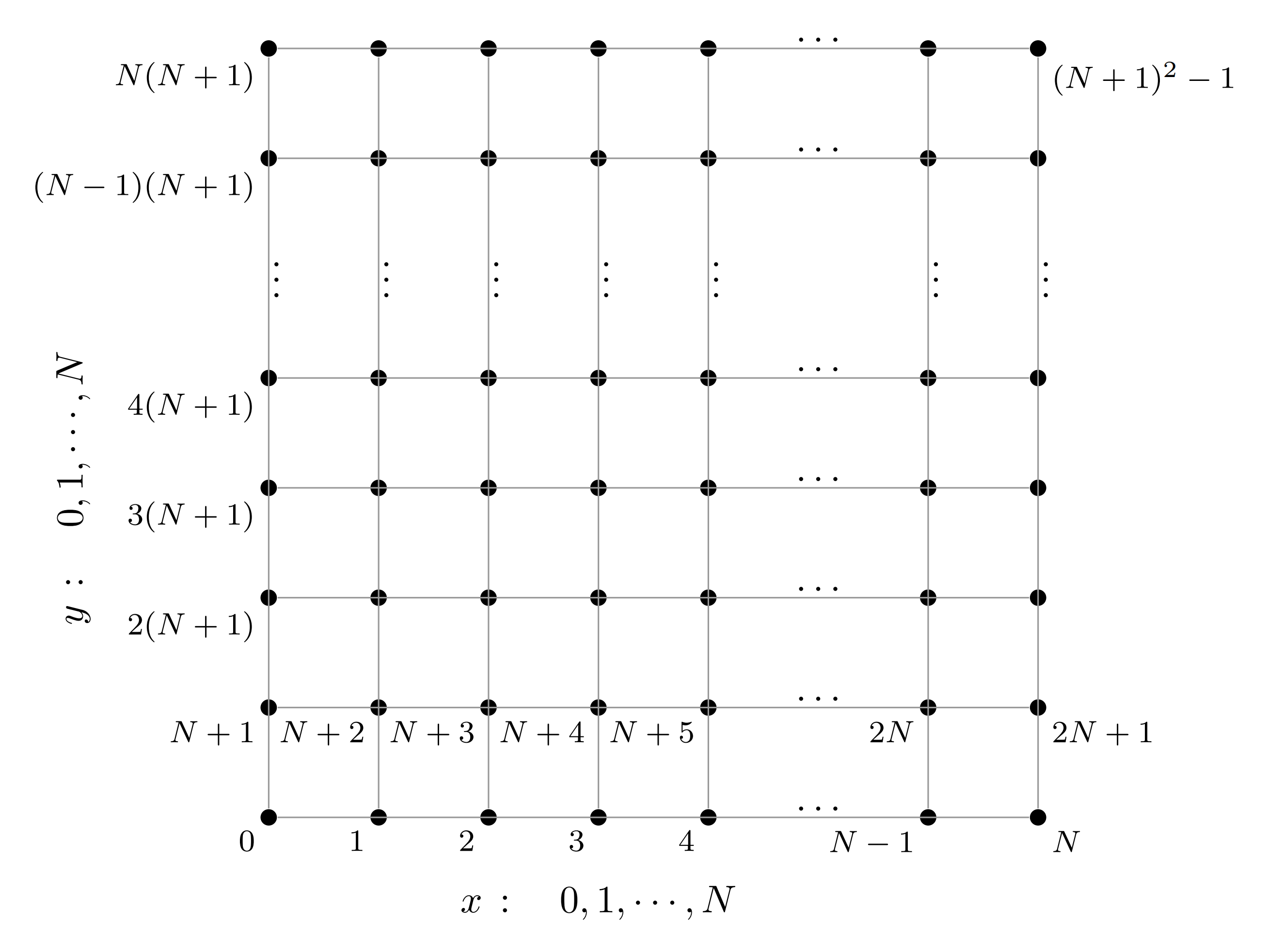
二维的拉普拉斯算符为
∇2=∂x2∂2+∂y2∂2
采用五点差分格式进行离散, 使用 [i,j] 表示编号为 i+j(N+1) 的格点, 记 dx=dy=h , 则对于内部节点:
(∇2T)[i,j]=h2T[i−1,j]+T[i+1,j]+T[i,j−1]+T[i,j+1]−4T[i,j]
对于第一类边界条件, 有
T[0,j]=T[N,j]=T[i,0]=T[i,N]=0
常系数单群中子扩散方程为:
∂t∂n=v1∂t∂ϕ(r,t)=S(r,t)+D∇2ϕ(r,t)−Σaϕ(r,t)
式中 n 为中子数密度, v 为中子速度, ϕ=nv 为中子通量密度, S 为中子源项, D 为扩散系数, Σa 为中子宏观吸收截面.
对于上述中子扩散方程:
- 左侧表示中子数密度的变化.
- 右侧第一项 S(r,t) 为中子的产生项, 在具体反应堆中, 由裂变反应产生, 与中子通量密度 ϕ 有关, 这里假定研究的区域是一个无裂变的区域, 中子源呈与中子通量密度相独立的分布.
- 右侧第二项 D∇2ϕ(r,t) 为中子的泄露项, 就其推导而言, 其原始形式为 −∇⋅J(r,t) , 根据菲克定律, 中子流 J=−D∇ϕ , 当扩散系数 D 为常数时, 即得到该项表达式.
- 右侧第三项 −Σaϕ(r,t) 为中子的吸收项, 同样假定空间物质分布是均匀的, 物质的宏观吸收截面为常数.
当上述方程左侧为 0 时, 即变为稳态常系数单群中子扩散方程:
−D∇2ϕ(r)+Σaϕ(r)=S(r)
该方程的含义即为 泄露项+吸收项=产生项 . 决赛的前一半分数, 即为该方程的离散求解.
在实际的反应堆问题中, 中子的能量是有一定的分布的, 且扩散系数与宏观吸收截面等参数是与能量有关的. 为了更细致的刻画中子通量密度的分布, 常采用的方法是把整个能量区间划分为若干区, 对每个区写出一个中子扩散方程, 上述的与能量有关的参数则取区间内的平均值, 称为群常数. 最简单的划分方式即划分为双群, 即高能的快群与低能的热群.
划分为双群后, 中子扩散方程也会发生一定的变化, 需要增加中子在两群中转移的项, 用两个散射转移截面 Σ1→2,Σ2→1 来表征. 在理论上, 反应堆中的中子发生散射后能量会降低, 也就是说通常只有快群向热群的散射, 而热群向快群的散射是难以发生的, 即 Σ2→1 是接近于 0 的, 但是为了使两群的中子扩散方程耦合 (在实际的反应堆问题中, 热中子发生链式反应后会产生快中子), 在决赛中假定 Σ2→1 是非零的.
假定中子源产生的都是快中子, 则稳态常系数双群中子扩散方程为:
−D1∇2ϕ1(r)+Σa1ϕ1(r)+Σ1→2ϕ1(r)−Σ2→1ϕ2(r)=S(r) −D2∇2ϕ2(r)+Σa2ϕ2(r)+Σ2→1ϕ2(r)−Σ1→2ϕ1(r)=0
对于该方程组, 不难发现任何一个方程都无法独立求解, 为了求解该方程组, 有以下两种思路:
- 分离求解: 使用 Picard 迭代方法, 求解一个方程时, 将一个物理场视为未知量, 其他物理场视为常数, 不同方程之间不断迭代, 并传递耦合参数, 直到收敛.
- 耦合求解: 将每个方程离散得到矩阵组合起来, 形成的分块矩阵每一块表示物理场之间的耦合, 对这个矩阵进行整体求解.
稀疏矩阵 (sparse matrix) 是一种元素大部分为零的矩阵, 反之, 如果大部分元素都非零, 则称矩阵是稠密 (dense) 的.
对于一个 n 阶的方阵, 假设每行的平均非零元素数目为 d , 则使用稠密矩阵的方式存储所消耗的空间为 O(n2) , 而稀疏矩阵只存储非零元素的信息, 所消耗的空间为 O(nd) . 一般来讲, d≪n , 这样稀疏矩阵可以大大减少存储所用的空间, 同时也在一定程度上加快了相对应的运算速度.
对于上述的 PDE 离散后形成的线性方程组, 非耦合的条件下每行至多有 5 个非零元素, 对于双群理论的耦合方程组, 每行至多有 6 个非零元素, 明显是稀疏矩阵.
COO 格式 (Coordinate list) 存储一个 (行, 列, 值) ((row, column, value)) 元组的列表. 在具体的 C/C++ 实现中: 可以创建一个含有 r, c, v 三个元素的结构体, 然后用一个结构体数组来存储; 也可以直接创建三个数组 row, col, val 来存储矩阵信息, 这时需要保证元素的对应关系, 即 row[i], col[i], val[i] 对应的是同一个矩阵元的信息.
在理想情况下, 条目应先按行索引排序, 再按列索引排序, 这样可以方便矩阵元素的修改维护, 也可以方便计算. 假设 COO 中存储了 n 个矩阵元素的信息, 则随机的添加/删除/修改一个元素, 所需的平均时间复杂度为 O(n) , 对于工程化的实现, 如果想要尽可能降低随机修改的时间消耗, 可以使用 DOK 格式 (Dictionary of keys), 即使用词典 ( 散列表 ) 来存储矩阵元素, 可以使用该格式进行矩阵的构建, 然后再转化为便于计算的格式.
一个稀疏矩阵的例子如下:
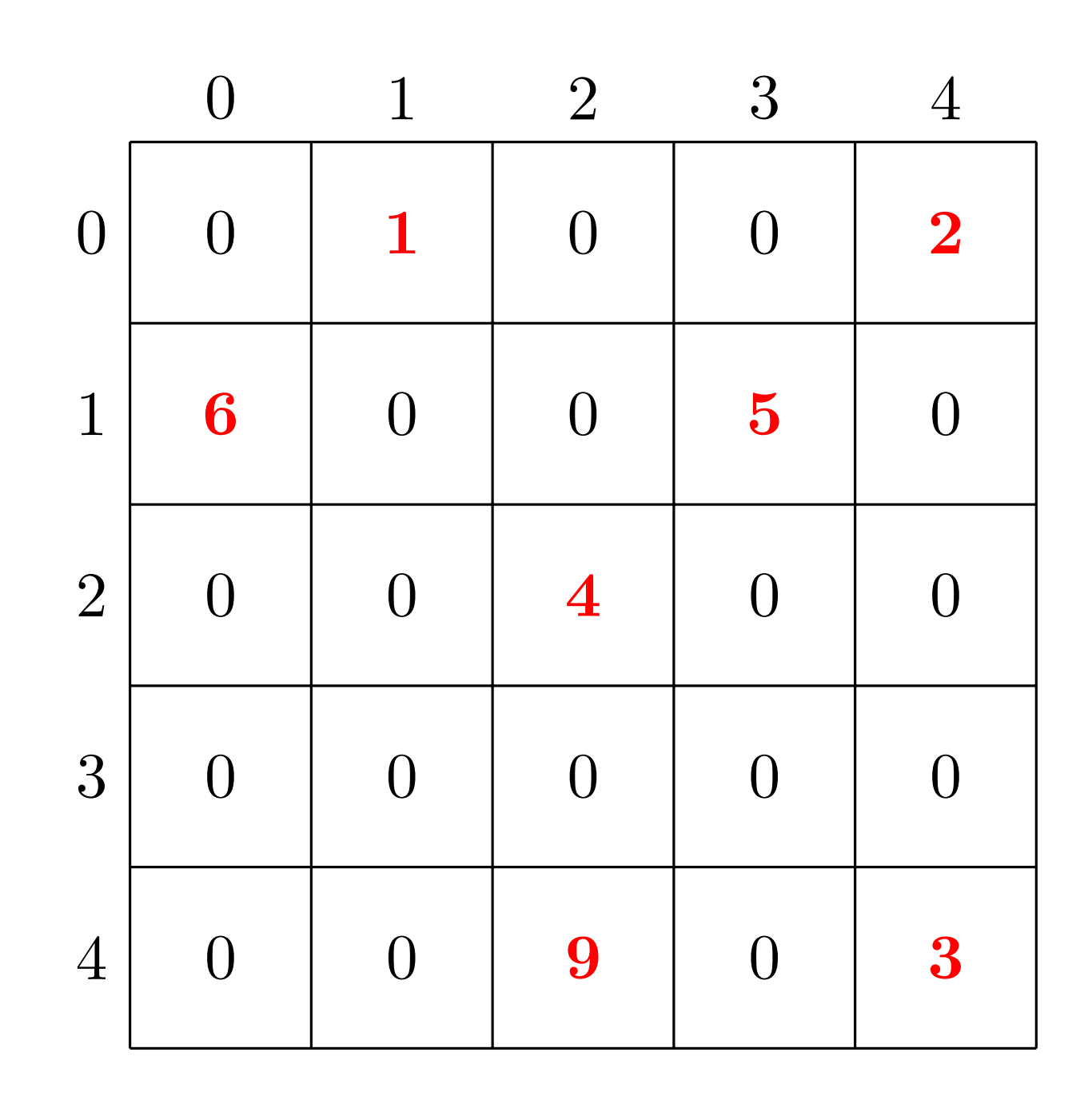
用 COO 格式表示为:
row: 0, 0, 1, 1, 2, 4, 4;col: 1, 4, 0, 3, 2, 2, 4;val: 1, 2, 6, 5, 4, 9, 3.
CSR 格式 (compressed sparse row, 压缩行储存) 和 CSC 格式(compressed sparse column, 压缩列储存) 是另外两种常用的稀疏矩阵储存方法. 以 CSR 为例, 矩阵被分为三个数组: 行指针 row , 列索引 col 和值 val, 行指针数组记录每行的起始位置 (row[i+1] - row[i] 即为第 i 行的非零元素数目) , 列索引数组存储每个非零元素的列索引, 值数组包含相应的非零元素值; CSC 格式与此类似.
CSR/CSC 格式与 COO/DOK 格式相比, 对顺序性有着较强的要求, 不适用于矩阵的构建 (当然, 如果已知矩阵的内容, 也可以直接按顺序强行构建); CSR/CSC 格式对于快速访问与计算有优势.
对于上述的稀疏矩阵, 用 CSR 格式表示为:
row: 0, 2, 4, 5, 5, 7;col: 1, 4, 0, 3, 2, 2, 4;val: 1, 2, 6, 5, 4, 9, 3.
用 CSC 格式表示为:
row: 0, 0, 1, 1, 2, 4, 4;col: 0, 1, 2, 4, 5, 7;val: 1, 2, 6, 5, 4, 9, 3.
稀疏矩阵涉及的元素, 主要是稀疏矩阵向量乘 (Sparse matrix–vector multiplication, SpMV). 以 COO 格式为例, 假设使用 row, col, val 三个数组来存储非零元素信息, 用 nnz 来表示非零元素数目, 则 y=Ax 的代码如下 (假定大小匹配且 y 各元素初值为0) :
for(int i = 0; i < nnz; i++){
y[row[i]] += val[i] * x[col[i]];
}
决赛要求使用以迭代法为基础的算法求解线性方程组.
对于一个稠密矩阵构成的小规模线性方程组, 我们在线性代数课程中学习过高斯消元法或 LU 分解法, 这种直接法在确定的时间内能够求出准确的解 (忽略计算机的舍入误差因素), 对于一个 n 阶的方阵, 其时间复杂度为 O(n3) .
但是, 对于稀疏矩阵构成的大规模线性方程组, 如果仍然采用上述的直接法求解, 则会破坏掉矩阵的稀疏性, 在内存有限的条件下无法满足需求, 且计算效率与准确度均无法得到保证, 这时使用迭代法能够更好的解决问题.
迭代法的基本思想, 就是对于方程组 Ax=b , 其中 A∈Rn×n 且可逆, b∈Rn , 可以把矩阵 A 分裂为 A=M−N , 其中 M 是一个方便求逆的矩阵, 则
Mx=b+Nx⟺x=M−1(b+Nx)
这样, 原方程可以等价的表示为一个迭代过程
x(k+1)=Bx(k)+f
其中 B=M−1N=I−M−1A , f=M−1b . 如果迭代矩阵 B 保持不变, 则称为定常迭代法.
可以证明, 若该迭代序列收敛, 则 limk→∞x(k)=x∗ 是原方程组的解. 迭代收敛的充要条件是, 迭代矩阵的谱半径满足
ρ(B)=λ∈σ(B)max∣λ∣<1
充分条件是, 迭代矩阵的谱范数 (矩阵的谱半径不大于任意矩阵范数) 满足
∥B∥2=∥x∥=1max∥Bx∥=ρ(BTB)<1
若系数矩阵 A 的对角线元素不全为 0 , 则可分解为
A=D−(L+U)
其中 D 为 A 的对角元素所构成的对角矩阵, L 为严格下三角矩阵, U 为严格上三角矩阵, 则 Jacobi 迭代法的迭代公式为
x(k+1)=(I−D−1A)x(k)+D−1b
用矩阵元的形式可写为
xi(k+1)=aii1bi−j=1,j=i∑naijxj(k)
每步迭代中 i 从 1 到 n 可并行计算.
如果 A 严格对角占优, 则可以证明 Jacobi 迭代法收敛.
若系数矩阵 A 的对角线元素不全为 0 , 则可分解为
A=(D−L)−U
其中 D 为 A 的对角元素所构成的对角矩阵, L 为严格下三角矩阵, U 为严格上三角矩阵, 则 Gauss-Seidel 迭代法的迭代公式为
x(k+1)=(D−L)−1Ux(k)+(D−L)−1b
用矩阵元的形式可写为
xi(k+1)=aii1(bi−j=1∑i−1aijxj(k+1)−j=i+1∑naijxj(k))
每步迭代中 i 从 1 到 n 需按序计算.
如果 A 严格对角占优, 则可以证明 Gauss-Seidel 迭代法收敛.
若系数矩阵 A 的对角线元素不全为 0 , 引入松弛因子 ω∈(0,2) , 则 A 可分解为
A=(ω1D−L)−(ω1−ωD+U)
其中 D 为 A 的对角元素所构成的对角矩阵, L 为严格下三角矩阵, U 为严格上三角矩阵, 则 SOR 迭代法 (松弛法) 的迭代公式为
x(k+1)=(D−ωL)−1[(1−ω)D+ωU]x(k)+ω(D−ωL)−1b
用矩阵元的形式可写为
xi(k+1)=(1−ω)xi(k)+aiiω(bi−j=1∑i−1aijxj(k+1)−j=i+1∑naijxj(k))
每步迭代中 i 从 1 到 n 需按序计算.
迭代法第 k 步的收敛误差为
ε(k)=x(k)−x∗=Bk(x(0)−x∗)=Bkε(0)
所以
∥ε(0)∥∥ε(k)∥<∥Bk∥
因此平均每次迭代后误差的压缩率为 ∥Bk∥1/k , 定义平均收敛速度为:
Rk(B)=−ln∥Bk∥1/k
渐进收敛速度定义为
R(B)=k→∞limRk(B)=−lnρ(B)
如果 0<ρ(B)<1 , 则线性收敛; 且一般来说, ρ(B) 越小, 收敛速度越快.
一般情况下 Gauss-Seidel 比 Jacobi 的 ρ(B) 更小, 收敛速度更快; 对于 SOR 迭代法, 当 ω=1 时退化为 Gauss-Seidel 迭代, 为使迭代速度最快, 可以选取最佳松弛因子
ωopt=1+1−[ρ(I−D−1A)]22
- 代数多重网格法 (Algebraic Multigrid, AMG): 先用简单迭代 (平滑器) 快速消掉解中的高频误差, 再把问题投影到粗网格上去处理低频误差, 通过多层网格循环, 使所有误差都被快速消除, 从而高效求解大型稀疏线性方程组.
- Krylov 子空间法: 猜测一个初始解 x0 , 从初始残差 r0=b−Ax0 出发,构造由 r0,Ar0,A2r0⋯ 生成的 Krylov 子空间, 在这个子空间里逐步寻找最优解, 通过迭代不断减小残差, 直至收敛.